2.007: design and Manufacturing I (spring 2013)
This was a semester-long individual project for 2.007, an introductory design class in which students fabricate their own robots for a competition similar to First Robotics or Botball. The theme for the year I took the class was the board game Operation. Each student was equipped a box of raw materials (aluminum, steel, ABS, delrin, etc.), a planetary gear motor, a couple of serovos, and other various components. We were also given access to a fully equipped machine shop and rapid prototyping machines.
competition results
In the two-day final competition, I ended up placing in the top 10 of nearly 100 students. Since this was one of my first exposures to design and manufacturing, I was very satisfied with the result. 2.007 was one of my favorite classes at MIT, and through it I gained many new skills including machining, CAD, and design intuition.
|
|
|
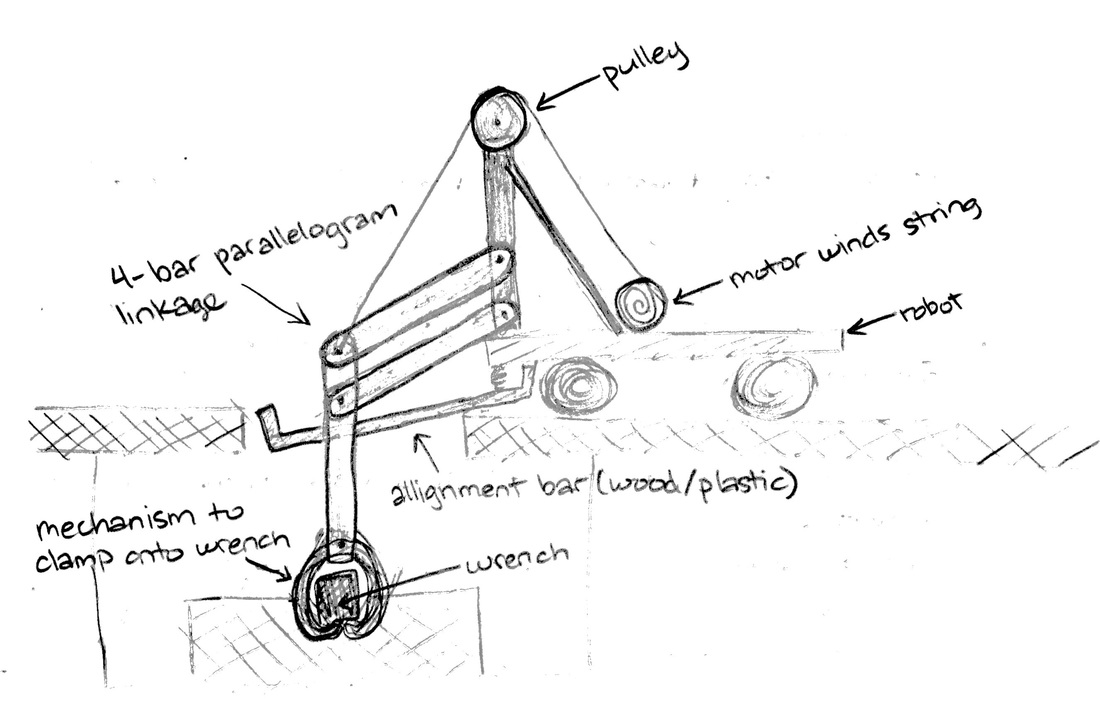
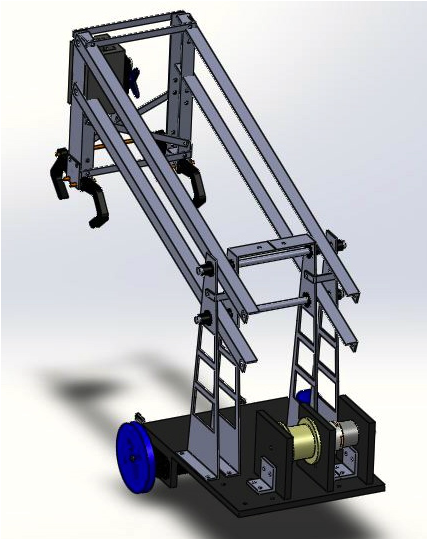
Main features of my robot:
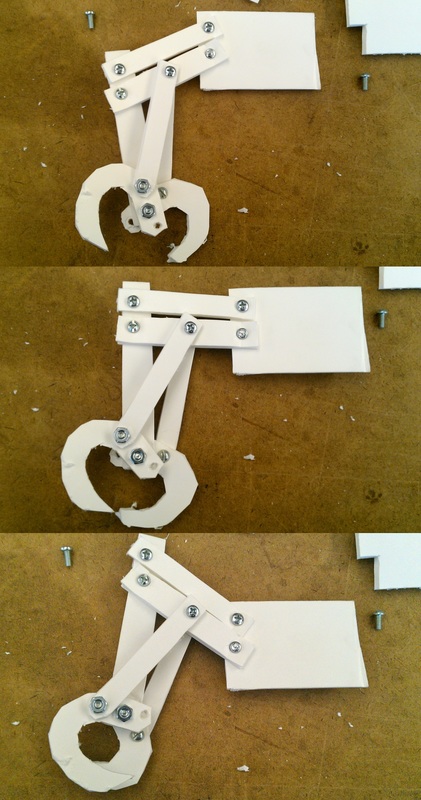
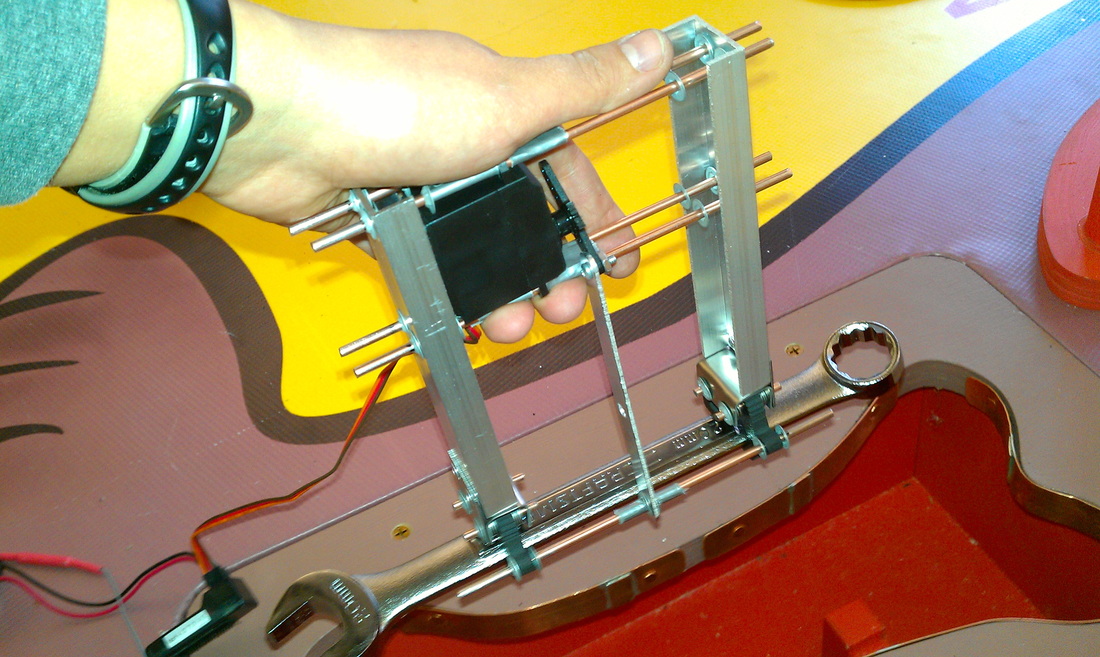
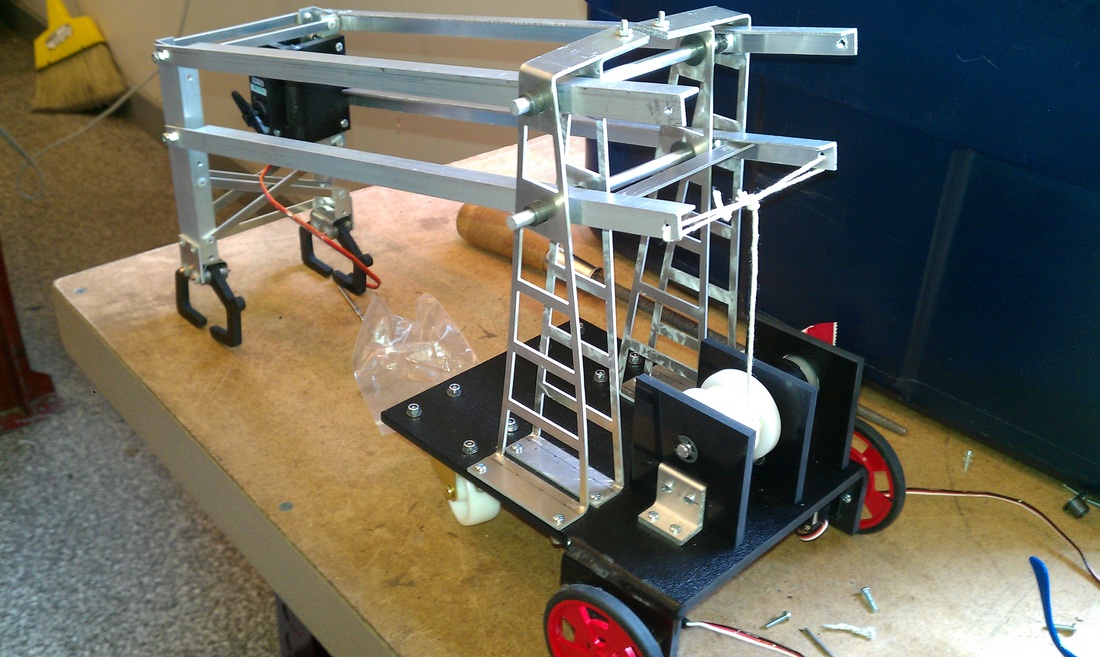
- Custom gear-driven grippers
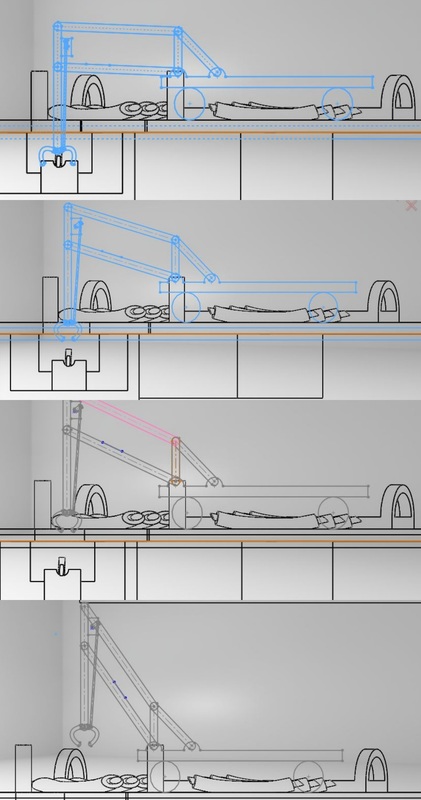
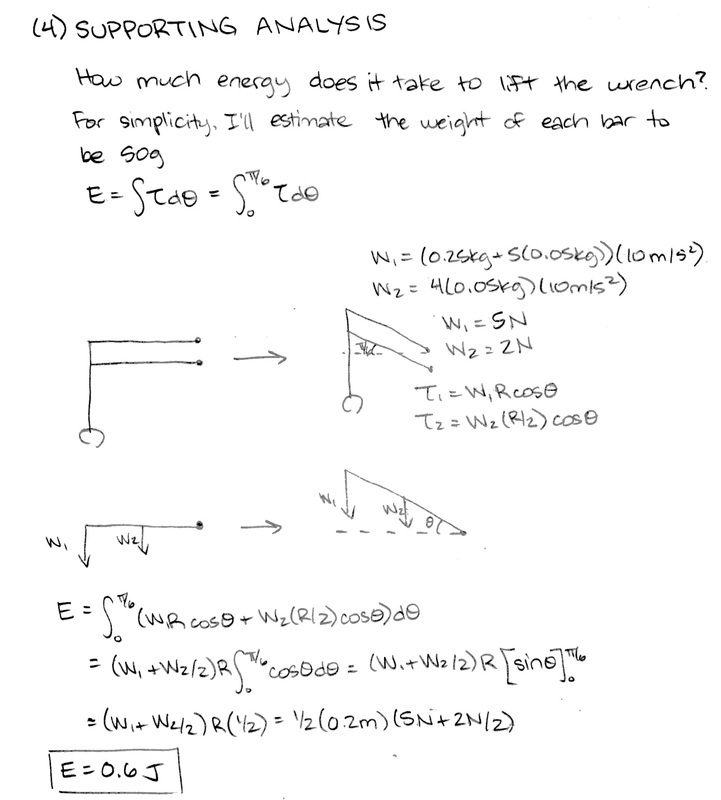
- 4-bar linkage crane allowed the robot claws to reach below "ground" and lift to about twice the height of the robot
- Front-wheel drive provided good traction and control
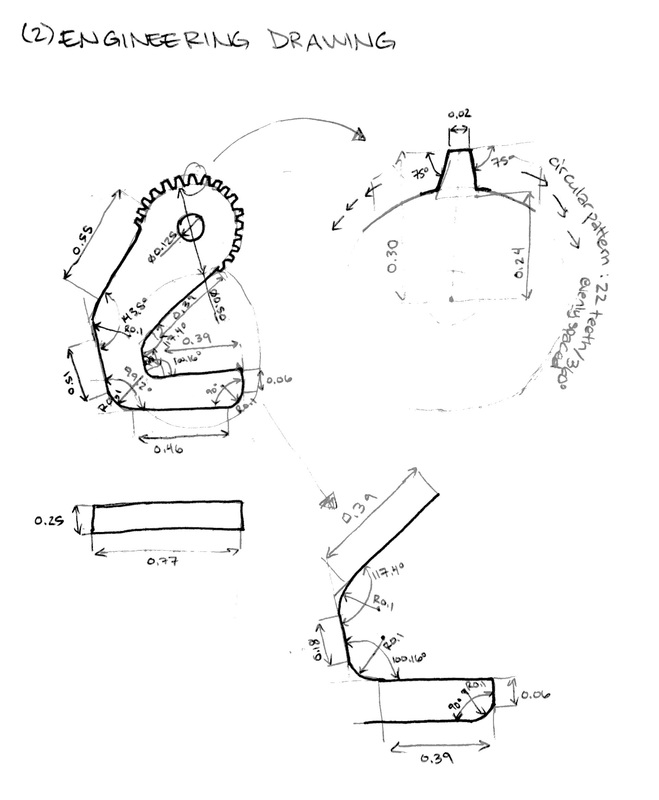
- All major parts were either off-the-shelf products or waterjetted, which made design iteration quick and easy
(Hover over images to see captions, click to enlarge.)